Fotogrametria ako nástroj digitalizácie malých objektov
Úvod
Fotogrametria je vedná disciplína, kde jej úlohou je zachytávanie rôznych geometrických tvarov získaných zo snímok z fotoaparátov. Tento spôsob generovania 3D modelov siaha do 19. storočia. Jej vývoj od tohto obdobia narastal radikálnym spôsobom, kde v súčasnej dobe sa pomocou tejto techniky zachytávajú veľmi veľké objekty a tiež sa mapujú aj veľké územia. S veľkou popularitou fotogrametrie úzko súvisí aj vývoj zariadení a ich rozlíšení a tiež, aj výkon softvérov.
Podpora rýchlych spracovaní dáta cez softvér je podmienená výkonnými parametrami pracovných staníc. Už dávno neplatí čím vyššia konfigurácia, tým lepší výkon. Je potrebné dnes na základe určitých predpokladov rýchlych spracovaní dát optimalizovať konfiguráciu počítačových zostáv. Zachytávanie jednotlivých bodov objektov tak, aby bol 3D objekt čo najvernejšou kópiou býva podporené aj terestriálnym laserovým skenerom. Pri zachytávaní malých objektov s použitím skenerov sa používajú zariadenia s vysokou presnosťou a pri použití iba fotogrametrie sa používajú kontrolné body resp. značky. Objekt zachytený fotogrametriou sa nasníma z rôznych uhlov a polôh.
Tieto obrázky sa načítajú do daného softvérového prostredia, kde softvér na základe preloženia jednotlivých obrázkov vo vzťahu k polohe vykreslí spoločné body. Tieto body tvoria tzv. Pointcloud, ktorý je podkladom pre ďalší proces generovania 3D objektu. Z veľkého počtu bodov je možné vo veľmi krátkom čase určiť vzdialenosti jednotlivých bodov a kvalitu výstupu. Tento proces donedávna vychádzal na základe dostupných bežných fotoaparátov. Dnes je na trhu kvalita fotoaparátov veľmi vysoká, čo tvorí predpoklad na zachytávanie väčších detailov objektov. V prípade použitia fotogrametrie v oblasti tvorby 3D modelov kultúrneho dedičstva je oveľa dostupnejšia ako pri použití laserového skenera. V prípade presností fotogrametrie sa zvyšuje presnosť na základe vyššieho rozlíšenia obrázkov a počtom snímok.
Pri leteckom digitalizovaní sa používa Lidar umiestnený na lietadle, avšak toto zachytáva objekty iba z výstupov pointcloud. Hustota týchto bodov je závislá na rozlíšení skenovacieho zariadenia Lidaru. Revolúcia prišla s príchodom bezpilotných zariadení, na ktorých boli inštalované snímacie zariadenia, ktoré majú úlohu zachytávať zónu resp. objekty formou videa alebo snímkovania. Je možné, teda v súčasnej dobe na základe kombinácie terestriálneho laserového skenovania a fotogrametrie dosahovať výsledky vo veľmi vysokom rozlíšení. V prípade malých objektov je potrebné dodržiavať určité postupy a tiež disponovať vhodnou technikou.
Ak chceme zachytiť detailne malý objekt je potrebné v prípade fotogrametrie použiť objektívy s vysokým rozlíšením, teda s makro objektívom. Makro objektív má za úlohu zaostriť obrázok na malú vzdialenosť od objektu, čo umožňuje zachytávať aj ten najjemnejší detail. Jedine za pomoci makro objektívnu je možné vo výsledku dosiahnuť objekt vo vysokom rozlíšení. Výrobcovia fotoaparátov využívajú na to vzťah popisujúci, kde vzdialenosť medzi objektívom a objektom je vyjadrený premennými parametrami, a to zaostrovacou vzdialenosťou medzi rovinou objektu, obrazom a ohniskovou vzdialenosťou.
V prípade, ak je ohnisková vzdialenosť menšia ako štvrtina zo zaostrovacej vzdialenosti, tak výsledný obraz je zaostrený. Pre tento prípad existuje maximálna hranica zaostrovacej vzdialenosti, ale minimálna stanovená nie je. Priblíženie objektívu veľmi blízko k objektu a zvýšenie zaostrovacej vzdialenosti zvýši pomer zväčšenia, ale nedosahuje požadovaný výsledok detailu. Tento spôsob je možný nahradiť jednoduchým spôsobom, a to použitie telekonvertoru. Je to v dnešnej dobe veľmi dostupné riešenie ako kúpa nového objektívu. Poskytuje flexibilnejšie a presnejšie zväčšenie objektu so zameraním sa na detaily za použitia kompatibilného objektívu a fotoaparátu bez možnosti straty kvality obrazu. Nevýhodou týchto telekonvertorov je, že dochádza k zníženej hĺbke ostrosti pri zaostrení obrazu, kde pri obrázkoch s vysokým rozlíšením majú nižšiu kvalitu, ako pri špeciálnych objektívoch. Pre ľubovoľný objekt je postup digitalizácie v prípade fotogrametrie nasledovný:
- kalibrácia zariadenia
- snímanie objektu z rôznych uhlov a polôh so zameraním sa na ostrosť a citlivosť
- optimalizácia obrázkov v grafickom prostredí
- spracovanie obrázkov v softvérovom prostredí
- výpočet a generovanie meshu objektu
- optimalizácia objektu - triangulácia sieti
- unwrap a textúrovanie objektu
- analýza 3D objektu
Súvisiaci výskum
V súčasnosti k najrozšírenejšej metóde v rámci fotogrametrie patrí Brownov model. Existujú aj iné metódy skreslenia, ale Brownom model sa ukázal ako jeden z najpresnejších a často využívaný, aj v metrologických aplikáciách. Vo väčšine prípadov kalibračných metód sa využíva korešpondencia medzi 2D bodmi roviny a 3D bodmi. Kalibráciu navrhli Fauderas a Hall za pomoci jednoduchých kalibračných techník. Medzi prvými kalibračnými technikami bola technika navrhnutá výskumníkom Tsai a následne sa postup radiálneho skreslenia zlepšil v postupoch.
V komplexnom riešení je dôležité zohľadniť výber kalibračného objektu, stanovenú resp. požadovanú presnosť kalibrácie a stanoviť si presný cieľ. Vo všeobecnosti platí, že 3D kalibračné objekty vedú k lepšej kalibrácií. Prítomnosť zreteľných hĺbkových bodov znižuje koreláciu medzi ohniskovou vzdialenosťou a skreslením šošovky. Žiaľ výroba 3D kalibračných objektov je veľmi zložitá úloha. Najčastejšie sa používajú planárne kalibračné vzorce.
Výskum
Na získanie a porovnanie presnosti kalibrácie sa použil fotoaparát Canon 40d s objektívom 60 mm Macro a v prípade skenera sa použil Conoscan. Objektív fotoaparátu dokáže zaostriť od rohu po roh pri plnom detaile vo vzdialenosti len 20 cm od objektu. V prípade fotogrametrie je dôležité vedieť na začiatku rozmer kalibračného vzoru, ktorý je vyjadrený:
![]()
f – reprezentuje ohniskovú vzdialenosť
g – reprezentuje vzdialenosť medzi objektom a šošovkou
h – reprezentuje vzdialenosť medzi šošovkou a senzorom
Ako kalibračné vzory sa použili šachovnica, symetrické bodové pole a asymetrické bodové pole. Stanovenie týchto kalibračných vzorov má demonštrovať mieru kvality kalibračného vzoru. Vo fotogrametrií platí, že čím viac fotiek, tým je predpoklad pre detailnejšie zachytenie objektu s prihliadnutím na to, že je potrebné meniť po ucelených slučkách uhly snímania.
V prípade výskumu sa pozornosť sústredila na uhol natočenia, a to zo sady fotiek bolo 10 obrázkov nastavených tak, aby na fotkách bol mierny šum, na zvyšných 5 obrázkoch bol objekt zachytený detailne. V prípade správania sa kalibračných vzorov boli odsledované dva faktory v 3 úrovniach. Odchýlka bola definovaná ako priemerná vzdialenosť obrázku v pixeloch medzi meranými body zo vzoru a bodmi z korigovaného obrázka. Použitá bola funkcia kalibrácie OpenCv, pretože táto metóda zachytáva správanie sa modelu, ktorý je ovplyvňovaný kalibráciou, inými účinkami. Všeobecne platí, že rozmer a počet bodov vzoru ovplyvňuje chybu premietania, s prislúchajúcim ohľadom na geometriu vzorov a snímačov fotoparáta.
Z použitého typu kalibrácie boli vypočítané vnútorné tangenciálne a radiálne skreslenia. Pri asymetrických bodových vzorov a k opätovnému snímaniu dochádza ku chybe zachytávania vzoru. Ak sa počet snímok zvyšuje, tak v tom prípade dochádza len k pomalému nárastu deformácie asymetrických bodových vzoroch. Ďalej z kalibrácie vyplynulo, že použitie šachovnice resp. symetrických bodov nemá výrazne zlepšujúce kalibračné schopnosti ako pri asymetrických bodoch. To znamená, že pri zhoršených podmienkach je možné predpokladať, že pri použití asymetrického bodového poľa nemusí dochádzať k zhoršeniu kalibrácie.
Na zistenie správnej metódy kalibrácie použitej na asymetrickom vzore sa verifikovali údaje na upravenom obrazci (obrázok 1), ktorý bol tvorený bodovým poľom, ale s čo najväčším pokrytím plochy, na ktorom bol asymetrický vzor.
Obrázok 1: Bodové pole
Bodové pole bolo zachytené 15 fotografiami, ktoré simulujú redukciu bodov, zníženia ostrosti, zvýšenie šumu (Obrázok 2).
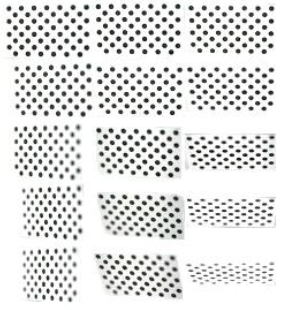
Obrázok 2: Miera rozostrenia obrazov
Chyba premietania je geometrická chyba medzi 2D bodovým poľom a 3D nasnímaného bodového poľa. Pri snímkovaní sa zvyšuje chyba reprojekcie s počtom fotografií a tiež aj väčšími uhlami. V skutočnosti chyba je v dôsledku aproximácie pri zisťovaní stredového bodu. Pri bezkontaktných meraniach boli zadefinované normy merania, ktoré však tiež nesú so sebou určité skutočnosti, ktoré je potrebné nezanedbať v procese získavania dát. Pre porovnanie kvality kalibrácie sa použil 3D skener s presnosťou 2,5 mikrónov v osi z a fotoaparát Canon. Ako vzorka na porovnanie bola použitá forma FAB kľúča.
Bodové pole zachytené v 3D priestore oboma technikami bolo verifikované so skutočným objektom, a to v rozmerových charakteristikách. Priemerná vzdialenosť bodov bola na úrovni 4 mikrónov. Ploché časti, resp. kolmé k snímaciemu zariadeniu na objekte je možné považovať za najpresnejšie, avšak so zmenou plôch a ich náklonom sa presnosť zhoršuje. Je to z toho dôvodu, že dochádza k takzvaným tieňom, ktoré majú za následok straty informácií v miestach, ktoré neboli pokryté snímaním. Tento defekt je možné odstrániť lepším nasnímaním plochy, a to pootočením objektu alebo natočením skenovacieho zariadenia resp. fotoaparátu. Týmto spôsobom získame viac informácií a tiež aj vyššiu presnosť a kvalitu nasnímaného objektu.
Porovnanie oboch techník naznačilo, že vždy je špecifický každý jeden prípad pre digitalizovanie objektu. Taktiež vždy závisí aj od účelu, kde a na aký účel bude použitý 3D model. Kým pri fotogrametrií je možné digitalizovať takmer všetko s prihliadnutím horšej kvality. Tak pri snímaní reflexnej kamery (skenerom) je vždy otázne s akou presnosťou je potrebné uvažovať. Taktiež toto skenovanie je potrebné vždy definovať vo vzťahu k presnosti resp. získaniu 3D modelu pre účely digitalizácie. V súčasnosti už táto technika výrazne napreduje v tom smere, že sa začínajú používať ručné skenery pri chôdzi a človek môže skenovať priestor v pohybe. Fotogrametria si našla vo veľmi krátkej dobe výrazné postavenie na pôde 3D digitalizácie a v niektorých prípadoch supluje skenovacie zariadenia.
Záver
Tento článok sa zaoberal predbežnou štúdiou kalibrácie OpenCv algoritmu za použitia fotogrametrie ako nástroja na prenesenie objektu do 3D virtuálneho prostredia. Preukázateľné sa ukázalo, že 3D skenery majú vyššiu presnosť ako fotogrametria. Avšak fotogrametria je aplikovateľná vo väčšine prípadov čo jej otvára možnosť uplatniť sa všade tam, kde nie je možné použiť skener.
Táto publikácia vznikla vďaka podpore v rámci operačného programu Výskum a inovácie pre projekt: IKT produkty pre komunikáciu v rámci inteligentných systémov, s ITMS2014 + kódom projektu 313011T413, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja.
![]()
Použitá literatúra:
- 1. J. Heikkila, O. Silven - "A four-step camera calibration procedure with implicit image correction" - CVPR97, 1997.
- 2. R.Y. Tsai - "A versatile camera calibration techniques for highaccuracy 3D vision metrology using off-the-shelf TV cameras and lenses" - IEEE International Journal Robotics and Automation, Vol. 3(4), pp. 323-344, 1987.
- 3. Z. Zhang - "A flexible new technique for camera calibration" IEEE Trans. on PAMI, Vol. 22(11), pp. 1330-1334, 2000.